





Baumuller包米勒伺服驱动器161 162 163 164 165 166 167 168 169故障代码怎么处理??哪里维修报警代码说明??
Baumuller伺服驱动器的故障代码128表示编码器2故障,具体为通信错误(HIPERFACE规范)。这一故障代码指向了编码器与驱动器之间的通信问题,可能是由于通信协议HIPERFACE规范未正确实施或存在物理连接问题导致的。解决这一问题可能需要检查编码器与驱动器之间的连接是否正常,以及确保通信参数设置正确。如果问题依旧存在,可能需要进一步的专业维修或更换损坏的部件
Baumuller伺服驱动器的故障代码120表示电机数据不正确。这一故障代码在多个来源中被提及,包括专业维修信息和故障代码分享,均指出120故障代码与电机数据的正确性有关。具体来说,当Baumuller伺服驱动器检测到电机数据不正确时,会显示此故障代码。这可能是因为电机数据的字段无效、保存电机数据的错误,或者电机数据本身就不正确,导致驱动器无法正确识别或响应。
对于这类故障,维修中心通常会建议检查和验证电机数据的准确性,包括但不限于电机型号、规格参数等,确保它们与驱动器的设置和要求相匹配。此外,如果电机数据是通过某种接口或通信方式传输给驱动器的,还需要检查通信线路和接口是否正常工作,以及是否存在干扰或错误传输的情况。
在维修实践中,解决这类故障可能涉及重新配置或校准电机数据,检查并修复任何可能导致数据传输错误的通信问题,或者如果需要,更换损坏的数据传输部件。通过这些措施,可以恢复Baumuller伺服驱动器的正常功能,确保其能够准确、可靠地控制电机运行
包米勒伺服驱动器报警维修代码119的含义是电机数据的无效数据字段。
包米勒伺服驱动器在运行过程中可能会遇到各种故障,其中报警维修代码119指示了一个具体的问题,即电机数据的无效数据字段。这种故障代码是用于诊断机器故障的信息之一,表明驱动器遇到了阻止其正常运行的条件。在处理这类故障时,首先需要理解故障代码的类型和含义,以便采取相应的维修措施。
故障代码可以分为两类:自动复位/运行故障和不可重置的故障。对于自动复位故障代码,如果排除故障后自动复位故障代码不再出现,可以尝试自行重启伺服驱动器。而对于不可重置的故障,如代码119所示,可能需要更深入的分析或采取行动来修复机器。这种类型的故障可能是由编程或接线错误引起的,可能需要专业的电机或驱动器维修。在排除故障原因后,才能复位并启动驱动器1。
此外,包米勒伺服驱动器的维修步骤通常包括检查电压、逆变模块、马达及连接电缆等关键部件,以确保其正常运作。在处理具体故障时,如F099诊断维修,可能需要更换损坏的驱动板或逆变模块,并注意检查马达及连接电缆的状态2。
综上所述,包米勒伺服驱动器报警维修代码119指示的是电机数据的无效数据字段问题,需要专业的维修人员进行分析和修复,以确保驱动器的正常运作
一:过电压故障,这里所指的电压常指直流母线电压,过电压产生第一种是种种原因造成的驱动器C和D之间电压高于额定电压,在过电压发生时,直流母线的储能电容将被充电,当电压升至760V(此值有些驱动器可调)左右时,驱动器过电压保护动作,
第二种情况是检测电路出现故障,正常的电压值被检测电路读成过电压或读成欠电压。 直流母线电压过高主要有以下原因,第一种输入电压过高所致,第二种减速时减速时间过短,电机受外力影响(风机,牵绳机)或位能负载(电梯,起重机)下放,由于这些原因,使电机的实际转速高于驱动器的指令转带,这时电机的转差率为负,其产生的电磁转矩为阻碍旋转的制动转矩,电动机处于发电状态,负载的动能再生成为电能,再生能量经IGBT的续流二极管动后给电容器充电,使直流母线电压上升,这就是再生过电压, 应用调试中过压问题的解决,由于过电压产生的原因不同,因而采取的对策也不相同。、
包米勒单相驱动器维修:
911:New set value missing for Set-of-set values
集合值的集合缺少新的集合值
The next set value did not arrive soon enough at the drive controller during the positioning process Set Value Specification (Set of set values).
在定位过程中,下一个设定值没有足够快地到达驱动器控制器设定值规范(设定值集)。
Error response „No response“ means here that the drive will not be locked due to the error and the reaction is done in the operating mode „Target Position Setting“. 错误响应“无响应”意味着驱动器不会因错误而锁定,并且响应是在“目标位置设置”操作模式下完成的。
In case of error the ongoing positioning will be aborted, the error will be messaged and the drive will be decelerated to a standstill with the positioning deceleration.
如果出现错误,正在进行的定位将被中止,将显示错误信息,并且驱动器将随着定位减速而减速至静止。
The error can be reset not before the brake application is finished.
不能在制动应用完成之前重置错误。
The error can be reset promptly at other error responses.
该错误可以在其他错误响应时立即重置。
鲍米勒伺服驱动器报警维修:87故障代码含义:安全继电器关闭(或故障)
鲍米勒驱动器维修:励磁控制中反馈控制方法:一是电压反馈控制;二是电流反馈控制。电压反馈是测量励磁端电压作为控制励磁端电压反馈量,它能恒压励磁端电压,但不能恒电流,不能恒定励磁磁场,对电机控制很理想。590中励磁控制方式选择了电压控制,励磁弱磁启动会被系统自动锁定,不会启动。电流反馈是测量励磁电流作为控制励磁电流反馈量,它能恒流励磁电流,此方式可以很好恒定励磁磁场。590中励磁控制方式选择了电流控制,励磁弱磁启动选择启动,电机就可以运转弱磁街段。
包米勒伺服驱动器报警代码85|BAUMULLER驱动器故障代码85
包米勒驱动器故障代码85代码含义:设备内部温度过高。
包米勒伺服驱动器故障维修:
1、自动复位/运行故障:当您对鲍米勒伺服器上的故障代码进行故障排除并看到自动复位故障代码时,您可以通过重新配置用户设置自动重新启动伺服器。如果您发现故障代码在指定的时间后不再存在,您可以尝试自行重启。
2、不可重置的故障:不可重置的故障代码可能需要更深入的分析或采取行动来修复您的机器。这种类型的鲍米勒故障代码可能是由编程或接线错误引起的。它可能需要电机或驱动器维修。必须先排除故障原因,然后才能复位并启动驱动器。
包米勒伺服器电源故障恢复主电源
92 =主电源欠压
93 =主电源过压
94 =欠压U DC链路
95 = 保留
P0207
马达故障:
96 =短路温度传感器(Tm <= -30°C)
97 =温度传感器 - 未连接电机(Tm> + 300°C)
98 =电机温度过高
99 =错误I2t> 100%
Baumuller鲍米勒伺服驱动器报警85号故障维修可能涉及到以下几个方面:首先,出现故障时,您需要对鲍米勒伺服器进行故障码的读取和解析。具体的故障码85可能代表着不同的故障类型。例如,P0206故障码可能指示功率单元故障,80号故障码可能代表着HIPER-FACE规范后的通信错误等。这些故障码都有可能引发伺服驱动器的报警。对于自动复位或运行故障,可以通过重新配置用户设置来自动重新启动伺服器。如果在指定的时间后故障码不再出现,那么您可以尝试自行重启机器。
然而,如果遇到不可重置的故障码,那么问题可能更为复杂。这类故障码可能需要更深入的分析或采取其他行动来修复您的设备。例如,如果故障码是由编程或接线错误引起的,那么可能需要电机或驱动器维修,必须先排除故障原因,然后才能复位并启动驱动器。此外,针对不同的故障码,可能还需要采取不同的措施。例如,如果故障码指示过电流、接地电流等,可能需要检查电源、线路等是否正常。如果故障码涉及到散热片温度、设备内部温度过高或断线温度传感器等,可能需要检查设备的温度控制和传感器的连接情况。总的来说,Baumuller鲍米勒伺服驱动器报警85号故障维修需要结合具体的故障码和设备运行情况,进行具体的分析和处理在。排除故障的过程中,您可能需要参考鲍米勒伺服驱动器的相关手册或使用指南,或者寻求专.业维修人员的帮助
Baumuller伺服驱动器故障代码76通常表示编码器通信异常。这种故障可能由多种原因引起,包括编码器线路故障、编码器损坏、驱动器内部故障或外部干扰等。为了解决这个问题,可以按照以下步骤进行排查和维修:
-
检查编码器线路:编码器线路是伺服驱动器与编码器之间传递信息的桥梁。如果线路出现断路、短路或接触不良等问题,就会导致通信异常。使用万用表等工具检查线路的通断情况,确保线路连接正确、紧固可靠。如果发现线路有问题,应及时更换或修复。
-
检查编码器:如果编码器线路正常,需要进一步检查编码器本身是否损坏。编码器是伺服驱动器的重要组成部分,负责将电机的旋转角度和速度等信息转换为电信号,供驱动器进行控制和计算。通过对比正常工作的编码器和故障编码器的参数来判断编码器是否损坏。如果确定编码器损坏,应及时更换新的编码器。
-
检查驱动器内部:如果编码器线路和编码器本身都没有问题,那么问题可能出在驱动器内部。需要打开驱动器外壳,检查驱动器内部的电路板、芯片等元器件是否损坏或老化。使用万用表等工具检查元器件的电压、电流等参数是否正常。如果发现元器件有问题,应及时更换新的元器件或整个驱动器。
-
排除外部干扰:在排查了编码器线路、编码器和驱动器内部之后,如果问题仍然存在,那么可能是外部干扰引起的。外部干扰可能来自电磁场、电源波动、温度变化等多种因素。可以尝试将伺服驱动器移动到其他位置或采取其他措施来减少外部干扰的影响,例如安装滤波器来减少电磁干扰,使用稳压电源来减少电源波动的影响等。
-
软件调试和参数设置:在排除了硬件故障之后,还需要检查软件调试和参数设置是否正确1。
包米勒伺服驱动器常见报警故障维修
1、指示灯都不亮;
2、FPH 供电中缺相,电源指示灯亮红灯;
3、SGR 放大器过流;
4、UZK 直流母线过电压;
5、UVS 电源电压过低;
6、TKK 散热器过热;
7、TBA 通电过载;
8、FLG 编码器故障;
9、TMO 电机温度过高;
10、FTO 转速表发生器信号错误;
包米勒伺服驱动器维修报警代码
P0203:通讯故障,
32 =超时协议,
33 =协议结构,
34 =错误的模块类型,
35 =电报中的数据太多,
36 =电报中的数据不足,
37 =操作数无效,
38 =无效的内存类型,
39 =无效的操作数地址,
40 =小于小值ad的值,
41=值大于大值,
42 =参数被写保护,
43 =此操作状态下的参数不可写,
44 =参数值无效,
45 =通信错误WinBASS控制器,
46-47 =保留,
Baumuller伺服驱动器故障代码57表示选件模块L出错。
Baumuller伺服驱动器报警代码提供了关于驱动器故障的详细信息,帮助技术人员快速诊断和解决问题。故障代码57特指选件模块L出错,这可能涉及到该模块的功能异常或与主系统的连接问题。解决此类故障通常需要检查选件模块L的安装和配置是否正确,以及与伺服驱动器主系统的通信是否正常。如果问题依旧存在,可能需要进一步的专业技术支持或更换故障模块1。

Baumuller伺服驱动器的故障代码61表示CPU异常,具体为W相电流信号异常。这种故障通常由以下几个原因引起:
- 电流信号AD转换芯片损坏:如果U相或W相电流异常过大,或者电流有尖峰突变,进入转换芯片的信号可能会远远超出芯片的输入上限,导致芯片损坏。
- 现场噪音干扰:较强的电磁噪音通过地线等途径进入伺服驱动器,导致电流信号转换芯片的工作电源异常,进而损坏。
- 静电等原因:内部CPU回路MPU可能因静电或其他原因损坏。
为了解决这个问题,可以采取以下措施:
- 检查机械负载的平滑性,防止负载有突变或冲击。
- 正确连接地线,确保电气连接的稳定性。
- 使用屏蔽线作为控制信号电缆,并可靠连接,以减少电磁干扰。
- 在控制电缆上安装抗干扰磁环,进一步增强抗干扰能力。
通过这些措施,可以有效减少伺服驱动器故障代码61的发生,保障设备的正常运行1。
鲍米勒伺服驱动器报警维修:鲍米勒驱动器主板故障维修中心:上电无显示、缺相、过流、过压、欠压、过热、过载、参数错误、有显示无输出、模块损坏等,优惠,维修率高,Baumuller鲍米勒伺服器维修,Baumuller鲍米勒驱动器维修,鲍米勒放大器维修,Baumuller鲍米勒电源维修,Baumuller鲍米勒变频器维修
鲍米勒伺服驱动器接地故障维修:
25故障:校验和错误闪存系统数据
1电机失速
故障原因:速度反馈的极性搞错。
处理方法:
a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以)
b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENCA和ENCB对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。确保该电源能提供足够的电流。如使用外部电源,确保该电压是对驱动器信号地的。
2电机在一个方向上比另一个方向跑得快
故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
故障原因:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
故障原因:偏差电位器位置不正确。
处理方法:重新设定。
BAUMULLER包米勒BM4700伺服报警代码维修中心
报警代码显示21
故障讲解/错误代码无效
报警代码显示22
故障代码讲解/警告代码无效
21 =无效的错误代码,22 =无效的警告代码,
BAUMULLER包米勒维修系列BUM60, BUM61, BUM62, BUM63, BUM, BKH63, BUS621, BUS622, BUS623, BUS624, BUG622, BUG623, BUM616, BUM617, BUM618, BUM619, BUG3, BUG2, BUG20, BUS3, BUS2, BUS20, BUS6V, BMAXX 4400, BMAXX 4500, V ConTROLLER (V-REGLER), OMEGA
鲍米勒伺服驱动器维修
一家专业维修公司/有鲍米勒测试平台,没有测试平台的公司,都是接单靠蒙的,修好就好,修不好就算了。一定要过硬的技术和真实的到位的服务,才能留住大的客户。
鲍米勒伺服驱动器维修常见故障:
1.故障原因①:电源输入电压低或者缺相
当驱动器电源缺相后,三相整流变为两相整流缺相时,负载越大,母线电压波动越大,当母线电压低于设定值,报出母线欠压故障。
解决对策:检查驱动器电源接线是否可靠及输入电压是否符合规格书要求。
2.故障原因②:制动电阻对地短路
解决对策:检查制动电阻接线。
3.故障原因③:母线电容容量衰减
驱动器工作过程中,母线电容的容量会不断缓慢减小;当母线电容容量过小时,母线电压波动大,可能导致母线欠压。(这种情况一般是驱动器的运行时间超出产品定义寿命)。
解决对策:更换母线电容。
专业从事各知名品牌伺服驱动器维修,伺服电机维修,触摸屏维修,变频器维修,伺服器维修,伺服控制器维修,数控系统维修改造,机器人维修保养以及各种板卡,芯片级维修维护的科技型企业,免费检测,快速维修,部分立等可取!
Baumuller鲍米勒放大器报警20代码,是没有可用内存的意思,在维修鲍米勒驱动器过程中,需要对其进行检测,在找出故障所在后,才可进行维修。

Baumuller鲍米勒放大器报警20维修讲解
故障:没有可用内存
伺服驱动母线过压
故障原因①:制动电阻未连接或阻值过大
电机处于制动工况时,负载侧向驱动器母线回馈能量,如果驱动器不能及时将这些能量通过制动电阻消耗,母线电压会不断增大,直到报出OU过压故障。
解决对策:检查制动电阻连接是否可靠,并确认制动电阻阻值是否符合产品说明书要求。
故障原因②:制动或减速时间过短
驱动器制动或者减速时间过小时,制动、减速工况时功率较大,超出制动单元所能承受值,导致母线电压超出设定值。
解决对策:在满足控制要求的条件下,调整驱动器的控制参数,例如适当增加(或延长)制动时间或减速时间。
故障原因:③电源输入电压过大
主要为电源侧冲击过电压,补偿电容在合闸或断开时形成的过电压等,主要特点电压变化率和幅值都很大。
解决对策:在电源输入侧增加吸收装置(并联浪涌吸收装置或串联电抗器等)。
Baumuller鲍米勒伺服驱动器维修,Baumuller鲍米勒伺服器维修,Baumuller鲍米勒MB4600伺服控制器维修,
可修复Baumueller鲍米勒伺服器常见故障:无显示、缺相、过流、过压、欠压、过热、过载、接地、参数错误、有显示无输出、模块损坏、报错等;
伺服器维修流程:
第1步:根据客户的故障描述,评估该伺服器的可修复性。
第2步:客户寄/送到我司,登记入库,等待检测。
第3步:工程师检测故障点,出具检测报告书,确定维修价格及维修周期。
第4步:维修报价,等待客户确认。同意则进行维修,不同意则原机返回。
第5步:维修ok, 带电机测试老化。
第6步:试机成功登记出库。
第7步:客户付款。
第8步:交付客户使用。
第9步:贴心的跟踪服务。

Baumueller鲍米勒驱动器电源维修
BUG623-56-54-E-013
Baumueller鲍米勒驱动器维修
BUG623-56-54-E-005
bug622-28-54-E-013
BUG623-56-54-B-005
BUG623-56-54-E-005
BUG623-56-54-E-007
鲍米勒伺服电机技术咨询,维修咨询服务,售后服务标准:
免费咨询!免费技术指导!免费检测!
鲍米勒伺服电机技术咨询,维修售后质量标准:
原装配件!原装检测!原装技术标准!
鲍米勒伺服电机销售咨询服务,销售服务标准:
质量保证!争做价格同行业最低,服务质量同行业最好的一个!
资料官网
http://www.oil-gift.com/Baumuller
鲍米勒伺服电机销售,鲍米勒伺服马达销售,
鲍米勒伺服驱动器销售,鲍米勒伺服器销售!
鲍米勒伺服电机售后,鲍米勒伺服马达售后,
鲍米勒伺服驱动器售后,鲍米勒伺服器售后!
鲍米勒伺服电机维修,鲍米勒伺服马达维修,
鲍米勒伺服驱动器维修,鲍米勒伺服器维修!
销售技术咨询服务电话13554907082李工(微信同号)
——★★★【承接维修单◆免费检测◆十五年代理销售服务更专业】★★★——
深圳市诚弘欣科技有限公司专业致力于伺服电机、驱动器、变频器等工控配件销售及维修的公司。
联系人:李仁
联系手机:13554907082 微信号
网址:http://www.chxsz.com www.oil-gift.com www.szsfwx.com QQ:184860417、1473293320
Baumuller鲍米勒伺服驱动器、伺服电机、直流伺服电机销售与售后咨询维修服务中心
Baumuller鲍米勒伺服电机系列
● DSD、DSC、DA、DS、DSL、DST、DF30K系列
● DSD045、DSD056、DSD071、DSD100系列
● DSC045、DSC056、DSC071、DSC100系列
Baumuller鲍米勒伺服控制器系列
● BUS621、BUS622、BUS623、BUS624系列伺服器;
● BUM60、BUM61、BUM62、BUM63、BUM64系列伺服控制器;
● BUG622、BUG623、BUG3、BUG2、BUG20系列伺服电源;
● BUM616、BUM617、BUM618、BUM619系列伺服器;
● BUS6V、BUS3、BUS2系列伺服控制器;
● BKD6、BKF12、BKH63系列伺服器
● b maXX 1000系列● b maXX 4100系列● b maXX 2400系列● b maXX 4600系列● b maXX 2500系列● b maXX 5000系列● b maXX 3300系列● b maXX 5500系列● b maXX 4000系列
Baumuller伺服电机销售,Baumuller直流伺服电机销售维修,Baumuller伺服控制器驱动器销售维修 ,Baumuller变频器销售维修
免费技术咨询!免费检测!免费保修!
Baumuller鲍米勒伺服电机马达销售与售后咨询维修服务中心
Baumuller鲍米勒直流伺服电机、特殊型号马达销售与售后咨询维修服务中心
Baumuller鲍米勒驱动器控制器变频器说明书下载及售后咨询维修服务中心
本公司有专业的伺服电机维修人员及高精度的伺服电机检测、维修设备,可准确、快速的对伺服电机的故障进行分析和做出相应的处理。例如:由于电机运行不良引起的高温失磁,匝间短路,磁块松脱,编码器损坏,码片损坏都能进行相应的维修。本公司有自己的仓库及海外正品供货渠道可保证维修的可靠性及实效性,大大减少客户由于电机损坏而导致整机停产而造成的损失。
本中心专业从事鲍米勒公司伺服产品的维修服务,是目前亚洲地区大第三方技术维修中心。
Baumueller(包米勒|鲍米勒)伺服电机维修
Baumueller(包米勒|鲍米勒)控制器维修
Baumueller(包米勒|鲍米勒)伺服控制器(驱动器、放大器)维修
BAUMUELLER BUS BUG BUM BUC BKD BKF BKH
BUL BUB EK2 BE2 BMC BGS BKE BUH 等系列
Baumuller鲍米勒伺服器,驱动板,控制器,伺服马达等国内销售维修
BE2系列 BKF系列 BUC系列 BUM系列 BGS系列 BKH系列 BUG系列 BUS系列 BKD系列 BMC系列 BUH系列
Baumuller Other系列 BKE系列 BUB系列 BUL系列 EK2系列
5D06.1 6SM56-S-3000-09-J
BE2/15/300
BGS 3A-15-20-003
BGS 3G-35-20-0-003
BGS 3G-35-20-B-002
BFK 12/120/400-2002
BFK 12/200/400-3010003
BFK 12/200/400-60400R012
Baumüller -
BKD 6/070/460-235000R00
BKD 6/100/460-204020006
BKD 6/120/460-228000R00
BKD 6/150/460-240020012
BKD 6/200/460-604010009
BKD 6/200/460-240020012
BKD 6/250/460-240020012
BKD 6/300/460
BKD 6/315/460
BKD 6/480/460-20402003
BKD 6/500/600-60401000
BKD 6/2000
BKD 6/6000
BKD 6/7000
Baumüller -
BKF 8/E824452
BKF 8/10/150
BKF12 Motorstyringer
BKF 12/30/400-3010003
BKF 12/50/400-2002
BKF 12/70/520-2002
BKF 12/70/400-2002
BKF 12/70/400-2001
BKF 12/70/400
BKF 12/100/400-2002
BKF 12/100/400-2009
BKF 12/120/400-2002
BKF 12/120/400-2006
BKF 12/120/520-2004
Baumüller motorstyringer
BKF 12-
BKF 12/200/400-1A
BKF 12/200/400-3010003
BKF 12/200/400-60400R012
BKF 12/200/520-2002
BKF 12/200/520-2004
BKF 12/200/520-3010001
BKF 12/200/520-3010201
BKF 12/600/400-60
BKF 12/2000
BKF 12/3000
BKF 12/6000
BKF 12/7000
Baumüller - reparation af motorstyringer
下面提供参考的只是部分Baumueller(包米勒)伺服电机、控制器(驱动器、放大器)、运动控制器的维修实例:
Baumueller(包米勒)伺服马达维修
故障现象:
开机时显示F0301,编码器过速。
更换伺服电机DSG71,发现故障依旧。
维修方法:
检查发现是V-Controller主控板上电路故障,更换受损的IC后故障即消失,正常测试8小时后交付客户。
包米勒bmaxx3000维修:
故障现象:
伺服系统上电后,数码管闪了一下后就没有反应了,偶尔可以正常开机,V-Controller上显示“1”。
维修方法:
经检查,发现控制电源的整流部分有打火现象,找到虚焊点处理后故障排除。
包米勒DSC 45-100、DA 100-280电机维修:
常见故障现象:
电机断轴
磁片破碎
定子接地
维修方法:
重新定做一根新轴,然后用专用设备装配、重做转子。
更换受损的磁片。
重新绕制定子线圈。
包米勒bmaXX1000维修:
故障现象:
开机运行时报警:主电路器件过热.不能通过复位排除故障。
维修方法:
经检查,发现伺服控制器内电路板上LM325运放开路,更换后故障排除。
BAUMUELLER伺服驱动器维修欠压故障
包米勒伺服电机编码器故障修复调零位
测试逆变电路将红表棒接到P端,黑表棒分别接U、V、W上,应该有几十欧的阻值,且各相阻值基本相同,反相应该为无穷大。将黑表棒N端,重复以上步骤应得到相同结果,否则可确定逆变模块有故障。二)动态测试在表态测试结果正常以后,才可进行动态测试,即上电试机。
在上电前后必须注意以下几点:1、上电之前,须确认输入电压是否有误,将380V电源接入220V级伺服驱动器之中会出现炸机(炸电容、压敏电阻、模块等)。2、检查包米勒伺服驱动器各接播口是否已正确连接,连接是否有松动,连接异常有时可能会导致伺服驱动器出现故障,严重时会出炸机等情况。
3、上电后检测故障显示内容,并初步断定故障及原因。4、如未显示故障,首先检查参数是否有异常,并将参数复归后,在空载(不接电机)情况下启动BAUMUELLER伺服驱动器,并测试U、V、W三相输出电压值。如出现缺相、三相不平衡等情况,则模块或驱动板等有故障。
5、在输出电压正常(无缺相、三相平衡)的情况下,负载测试,尽量是满负载测试。三)故障判断1、整流电压或内部短路引起。在排除内部短路情况下,更换整流桥。在现场处理故障时,情况,电压,有污染的设备等。2、逆变模块损坏通常是由于电机或电缆损坏及驱动电路故障引起。
在修复驱动电路之后,测驱动波形良好状态下,更换模块。在现场服务中更换驱动板之后,须注意检查马达及连接电缆。在确定无任何故障下,才能运行驱动器。3、上电无显示通常是由于开关电源损坏或软充电电路损坏使直流电路无直流电引起,如启动电阻损坏,操作面板损坏同样会产生这种状况。
4、显示过电压或欠电压通常由于输入缺相,电路老化及电路板受潮引起。解决方法是找出其电压检测电路及检测点,更换损坏的器件。5、显示过电流或接地短路通常是由于电流检测电路损坏。如霍尔元件、运放电路等。6、电源与驱动板启动显示过电流通常是由于驱动电路或逆变模块损坏引起。
7、空载输出电压正常,带载后显示过载或过电流通常是由于参数设置不当或驱动电路老化,模块损坏引起。
是静态检测:1.静态检测的具体步骤方法在静态检测时要检测整流电路:寻找驱动器內部直流稳压电源的P端和N端,将数字万用表调至电阻X10档,红表棒接到P,黑表棒分别依到R、S、T,应当有大概几十欧的阻值,且基本均衡。
BAUMUELLER伺服驱动器维修具体常见故障维修方法,伺服驱动器维修具体常见故障方法有哪些。反过来将黑表棒接到P端,红表棒按顺序接到R、S、T,有个接近于无穷大的阻值。将红表棒接到N端,反复上面流程,都应得到同样結果。
假如有下列結果,能够判断电源电路已出现异常:A、阻值三相不平衡,可以说明整流桥故障。B、红表棒接P端时,电阻无穷大,可以断定整流桥故障或起动电阻出现故障。其次是测试逆变电路:将红表棒接到P端,黑表棒分别接U、V、W上,应该有几十欧的阻值,且各相阻值基本相同,反相应该为无穷大。
将黑表棒接到N端,重复以上步骤应相同结果,否则可确定逆变模块故障。其次是动态测试:判断BAUMUELLER伺服驱动器维修具体故障方法有哪几种2.动态测试的具体操作方法在静态测试结果正常以后,才可进行动态测试,即上电试机。在上电前后一定要注意以下几点:(1)上电之前,须确认输入电压是否有误,将380V电源接入220V级驱动器之中会出现炸(炸电容、压敏电阻、模块等)。
(2)检查包米勒伺服驱动器各接播口是否已正确连接,连接是否有松动,连接异常有时可能导致驱动器出现故障,严重时会出现炸机等情况。(3)上电后检测故障显示内容,并初步断定故障及原因。(4)如未显示故障,首先检查参数是否有异常,并将参数复归后,进行空载(不接电机)情况下启动伺服驱动器,并测试U、V、W三相输出电压值。
包米勒BAUMUELLER故障代码维修
F064、F065、F066、F067、F068、F069、F070、F071、F072、F073、F074、F075、F076、F077、F078、F079、F080、F081、F082、F083、F084、F085、F086、F087、F088、F089、F090、F091、F092、F093、F094、F095、F096、F097、F098、F099、F100、F102、F103、F112、F113、F114、F115、F116、F117、F118、F119、F120、F121、F122、F123、F124、F125、F126、F127、F128、F129、F130、F131、F132、F133、F134、F135、F136、F137、F138、F139、F140、F142、F143、F144、F145、F146、F147、F148、F149、F150、F151、F152、F153、F154、F155、F156、F157、F158、F159、F160、F161、F162、F163、F164、F165、F166、F167、F168、F169、F171、F172、F173、F174、F175、、、
鲍米勒维修的系列包括:
BUM60、BUM61、BUM62、BUM63、BUM64、BKH63、BUS621、BUS622、BUS623、BUS624、BUG622、BUG623、BUM616、BUM617、BUM618、BUM619、BU***、BUG2、BUG20、BUS3、BUS2、BUS20、BUS6V等

鲍米勒伺服电机技术咨询,维修咨询服务,售后服务标准:
免费咨询!免费技术指导!免费检测!
鲍米勒伺服电机技术咨询,维修售后质量标准:
原装配件!原装检测!原装技术标准!
鲍米勒伺服电机销售咨询服务,销售服务标准:
质量保证!争做价格同行业最低,服务质量同行业最好的一个!
资料官网
http://www.oil-gift.com/Baumuller
鲍米勒伺服电机销售,鲍米勒伺服马达销售,
鲍米勒伺服驱动器销售,鲍米勒伺服器销售!
鲍米勒伺服电机售后,鲍米勒伺服马达售后,
鲍米勒伺服驱动器售后,鲍米勒伺服器售后!
鲍米勒伺服电机维修,鲍米勒伺服马达维修,
鲍米勒伺服驱动器维修,鲍米勒伺服器维修!
销售技术咨询服务电话13554907082李工(微信同号)
——★★★【承接维修单◆免费检测◆十五年代理销售服务更专业】★★★——
深圳市诚弘欣科技有限公司专业致力于伺服电机、驱动器、变频器等工控配件销售及维修的公司。
联系手机:13554907082 微信号
网址:http://www.chxsz.com www.oil-gift.com www.szsfwx.com QQ:184860417、1473293320
Baumuller鲍米勒控制器驱动器电源销售及售后咨询维修服务中心
Baumuller鲍米勒驱动器控制器变频器说明书下载及售后咨询维修服务中心
Baumuller鲍米勒直流伺服电机、特殊型号马达销售与售后咨询维修服务中心
Baumuller鲍米勒伺服电机马达销售与售后咨询维修服务中心
Baumuller鲍米勒伺服电机系列
● DSD、DSC、DA、DS、DSL、DST、DF30K系列
● DSD045、DSD056、DSD071、DSD100系列
● DSC045、DSC056、DSC071、DSC100系列
Baumuller鲍米勒伺服控制器系列
● BUS621、BUS622、BUS623、BUS624系列伺服器;
● BUM60、BUM61、BUM62、BUM63、BUM64系列伺服控制器;
● BUG622、BUG623、BUG3、BUG2、BUG20系列伺服电源;
● BUM616、BUM617、BUM618、BUM619系列伺服器;
● BUS6V、BUS3、BUS2系列伺服控制器;
● BKD6、BKF12、BKH63系列伺服器
● b maXX 1000系列● b maXX 4100系列● b maXX 2400系列● b maXX 4600系列● b maXX 2500系列● b maXX 5000系列● b maXX 3300系列● b maXX 5500系列● b maXX 4000系列
Baumuller伺服电机销售,Baumuller直流伺服电机销售维修,Baumuller伺服控制器驱动器销售维修 ,Baumuller变频器销售维修
免费技术咨询!免费检测!免费保修!
注:1.以下适合鲍米勒Baumuller bm4400、bm4600、bm4700系列驱动器。
P0201
处理器错误:
0=无故障
1=看门狗错误
2=意外中断错误
3=nmi总线错误
4—15=厂家保留
P0202
操作系统出错:
16=启动时出错
17=软件错误
18=时间设定故障
19=时隙时间错误
20= 1=无法存储记忆
21 =无效的错误代码
22 =无效的警告代码
23 =错误的FPGA版本
24 =双位置控制器:写入目标参数时出错
25 =校验和错误闪存系统数据IS
26 =不支持功率单元
27-31 =保留
P0203
通讯故障:
32 =超时协议
33 =协议结构
34 =错误的模块类型
35 =电报中的数据太多
36 =电报中的数据不足
37 =操作数无效
38 =无效的内存类型
39 =无效的操作数地址
40 =小于最小值ad的值
41=值大于最大值
42 =参数被写保护
43 =此操作状态下的参数不可写
44 =参数值无效
45 =通信错误WinBASS控制器
46-47 =保留
P0204
功能或选件模块出错:
48 =功能模块A中的错误
49 =功能模块B出错
50 =功能模块C中的错误
51 =功能模块D中的错误
52 =功能模块E中的错误
53 =选件模块G出错
54 =选件模块H出错
55 =选件模块J中的错误
56 =选件模块K出错
57 =选件模块L出错
58 =选项模块M中的错误
59 =等待从站的RST信号时超时
60 = SPI传输模块f控制器中的CRC错误
61 = SPI传输控制器模块中的CRC错误
62-63 =保留
P0205
电源输入故障:
64 =主电源故障
65 =相故障
66 =主电源欠压
67 =主电源过压
68 =欠压24V
69-78 =保留
79 =
P0206
功率单元故障
80 = HIPER-FACE规范后的通信错误
81 =散热片温度
82 = U DC链路过压
83=过电流
84 =接地电流
85 =设备内部温度过高
86 =断线温度传感器
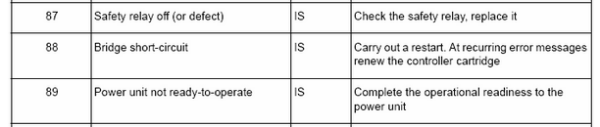
87 =安全继电器关闭(或缺陷)
88 =桥接器短路
89 =功率单元未准备好运行
90 =阶段失败
91电源故障恢复主电源
92 =主电源欠压
93 =主电源过压
94 =欠压U DC链路
95 =
P0207
马达故障:
96 =短路温度传感器(Tm <= -30°C)
97 =温度传感器
98 =电机温度过高
99 =错误I2t> 100%
100 =功率单元最大电流>电机最大电流101保留
102=集体错误发现缺口位置
103-111=保留
P0208
编码器1故障:
112=通信错误(HIPERFACE规范)
113=保留
114=覆盖编码器位置信息时出错
115=断线编码器1
116=超速编码器1
117 =超出幅度限制
118 =编码器类型未知
119 =电机数据的数据字段无效
120 =电机数据不正确
121 =保存电机数据的错误
122 =电机数据写保护。(对BM电机无效)
123 =场角误差
124 =没有温度测量的编码器
125 =编码器电子版中的存储容量太小
126-127=保留
P0209
编码器2故障:
128 =通信错误(HIPERFACE规范)
129保留
130 =覆盖编码器位置信息时出错
131 =断线编码器2
132 =超速编码器2
133 =超出幅度限制
134 =编码器类型未知
135 =电机数据的无效数据字段
136 =电机数据不正确
137 =保存电机数据的错误
138 =电机数据写保护。(对BM电机无效)139=Field angle error
140 =没有温度测量的编码器
142-143保留
P210
编码器管理器故障:
144 =编码器1未知的绝对位置
145 =编码器2未知的绝对位置
146 =缺少编码器模块1
147 =缺少编码器模块2
148 =缺少测量值存储的编码器模块
149 =在解析器中没有测量值存储可能
150 =触发不可能,因为没有增量编码器
151 =缺少数字I / O模块
152 =增量编码器仿真模块是必需的并且缺失
153 =编码器模块1是增量编码器仿真和输出所必需的
154 =编码器模块2是增量编码器仿真和输出所必需的
155 =
156 =增量编码器仿真模块(HW)发出错误信号
157 =错误增量编码器仿真模块
158 = SSI编码器仿真模块正在丢失
159 =设定值源编码器1或2出错
P211
驱动管理程序故障:
160 =超时通信
161 = BACI通信选项模块的超时
162 =超时循环通信
163 =超时所需数据
164 =现场总线错误
165 =控制器与外部信号不同步
166 =制动控制错误
167 =启动驱动器时没有松开抱闸
168 =停止驱动时没有关闭抱闸
169 =保持制动状态错误(循环监控)170 =保持制动衬片错误
171 =初始化抱闸错误
172 =抱闸错误:保持转矩不准
173-175=保留
P212
数据记录管理故障:
176 = EEPROM复制错误
177 =写入超时EEPROM
178 =校验和错误EEPROM
179 =没有启动数据集
180 =不兼容的软件
181 =没有数据集
182 = PSI模块的校验和错误
183 = PSI已重置请保存所有数据记录
184 = PSI数据无效
185 =自动调整表无效
186 = A / D校正表无效
187 = EEPROM复位
188-191=保留
P213
位置控制器故障:
192=位置动态偏差
193=位置静态偏差
194=编码器1用于位置控制,但处于非活动状态。如果故障定位位于其中一个非活动数据线中,也会显示此错误
195=编码器2用于位置控制,但处于非活动状态。如果故障定位位于其中一个非活动数据线中,也会显示此错误。
196=软件限位开关1超出
197=超出软件限位开关2
198=硬件限位开关1超出可调节性
199=硬件限位开关2超出可调节性
200=返回未执行
201=模式设定点设定点没有及时到达
202=最小化目标位置或调整模数位置P1239
203=主轴定位:触发器初始化时出错
204=主轴定位:触发信号超时
205=执行归位时发生错误
206-207保留
P214
速度控制器故障:
208=堵转
209=编码器1被参数化为电机控制的编码器,但评估未被激活。如果错误定位在一个非活动数据记录中,则也会发生此错误
210=编码器2被参数化为电机控制的编码器,但评估未被激活。如果错误定位在一个非活动数据记录中,则也会发生此错误
211=超速开环
212-223=保留
数码管显示意义:
0,不准备启动
1,禁止开始
2,准备开始
3,打开
4,操作已启用
5,操作已启用; 命令“禁用操作”激活
6,操作已启用; 命令“关闭”激活
7,快速停止激活
E,故障反应活跃
F,故障
控制器bus 6-vc-ac)
f0001=BASS协议超时
f0002=USS通讯协议超时
f0003=双端口通讯RAM超时(循环数据)
f0004=双端口通讯RAM超时(工作数据)
F0005=系统启动程序故障(版本是否兼容或更换新件)
F0006=刹车时间过长或损坏(参数p188)
F0010=程序错误(软件使用故障)
F0110=电源干扰故障(复位不行需维修)
F0201=母线过压(大于dc800v)
F0202=输出过流(电流超过p113)
F0203=电流故障(输出有短路或不平衡)
F0204=辅助电源干扰
F0205=散热器过温
F0206=安全电源或继电器干扰故障
F0207=功率单元故障
F0208=U相上桥故障
F0209=U相下桥故障
F020a=V相上桥故障
F020b=U相下桥故障
F020c=W相上桥故障
F020d=W相下桥故障
F020e=控制器无法识别功率单元(p117识别功率版本)
F020f=错误的功率单元(无法匹配)
F0210=动力单元干扰(或未准备好)
F0d01=散热器温度过低(参数p189)
F0301=编码器1已经过度
F0302=编码器2已经过速
F0303=编码器1位置错误
F0304=编码器2位置错误
F0401=电机过电流(超过p91参数值)
F0501=马达过温
F0502=马达温度过低
F0601=动态偏差错误(检查设置参数p210/p203设置数据或重新校准)
F0602=静态偏差
F0702=堵转
F0801=控制器和逆变器不匹配或损坏
F0802=错误的编码器模块
F0803=编码器无法通信
F0804=编码器断线或未连接
F0805=编码器反馈地址错误
F0806=编码器报告错误
F0807=编码器反馈错误
F0808=编码器校验错误
F0809=编码器位置错误
F080A=编码器无法识别
F080B=编码器通讯超时
F080C=编码器正余弦脉冲故障
F080D=编码器角度错误
F0901=eepom复制数据错误
F0902=无法启动(程序丢失)
F0903=启动数据校验错误(程序数据损坏)
F0A01=适配器模块无效(版本不对或不支持)
F0A02=编码器适配模块错误
F0A03=编码器读取绝对位置信号失败
F0A04=编码器2断线
F0A05=编码器地址错误(或无法读取)
F0A06=编码器自检不能通过
F0A07=编码器回馈信息错误
F0A08=编码器校验和回复信息错误
F0A09=编码器位置错误
F0A0A=未知编码器代码
F0A0B=编码器通讯超时
F0B01=控制器启动超时(恢复出厂设置后在重置参数)
F0B02=控制器计算时间超时(恢复出厂设置后在重置参数)
F0B03=控制器同步超时(恢复出厂设置后在重置参数)
F0B04=控制器dsp运算超时(恢复出厂设置后在重置参数)
F0B05=链接程序是模块出错(复位或重新上电,不行恢复出厂设置再重试)
F0B06=规定的时间内系统配置出错(复位或重新上电,不行恢复出厂设置再重试)
F0C01=不认可的外部总线访问故障(重启)
F0C02=不正确的指令输入故障(重启)
F0C03=不正确的操作数据故障(重启)
F0C04=保护故障(软件)(重启)
F0C05=不正确的操作码故障(重启)
F0C06=存储故障(重启)
F0C07=存储溢出故障(重启)
F0C08=外部干扰导致数据中断(重启)
F0C09=看门狗超时(无法复位)故障(重启)
F0D01=功率模块温度检测传感器短路
包米勒伺服驱动器代码分析及故障现象维修
指令诊断信息 B、C 和D :
F401 双MST 故障关机
F402 双MDT 故障关机
F403 通信阶段关机
F404 阶段前进过程中出现错误
F405 阶段后退过程中出现错误
F406 无就绪信号阶段切换
F407 主通信初始化过程中的错误
F411 双SST 故障关机
F434 紧急停机
F629 超过正行程极限
F630 超过负行程极限
F634 紧急停机.
F643 探测出正行程极位开关
B100 指令释放电机制动器
B101 不启用指令
B200 制动器检查指令
B201 只在驱动器启用下进行制动器检查
B202 在制动器嵌入过程中出现错误
B203 制动器制动转矩太低
B300 后备工作内存程序指令
C100 通讯阶段3 传输检查
C101 无效通信参数(S-0-0021)
C102 通信参数极限错误(S-0-0021) .
C104 MDT 的配置IDN 不可配置
C105 配置长度大于MDT 比较大长度
C106 AT 的配置IDN 不可配置
C107 配置长度大于AT 比较大长度
C108 时间间隙参数大于Sercos 循环时间
C109 MDT(S-0-0009)中的数据记录位置为偶数
C110 MDT(S-0-0010)长度为奇数
C111 ID9 + 记录长度-1 大于长度MDT(S-0-0010)
C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误.
C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误
C114 T4 大于TScyc(S-0-0002)- T4min(S-0-0005)
C115 T2 数值太小.
C118 MDT 配置顺序错误
C200 通讯阶段4 传输检查
C201 无效参数(S)(->S-0-0022)
BAUMULLER包米勒伺服驱动器报警代码讲解?
4168=Cmd界面:校验故障
4169=模块识别:读取时出现PCI错误
4170=块识别:写入时出现PCI错误
4171=模块识别:一般读取错误
4172=模块识别:写入时的一般错误
4173=内部错误
4174=配置循环服务:参数不是循环可写的
4175=配置循环服务:无效参数编号
4176=错误的选项,模块错误代码
4177-8191=保留
8192=错误CANopen超时(在编程手册中查找)
Baumuller鲍米勒伺服电机系列
● DSD、DSC、DA、DS、DSL、DST、DF30K系列
● DSD045、DSD056、DSD071、DSD100系列
● DSC045、DSC056、DSC071、DSC100系列
Baumuller鲍米勒伺服控制器系列
● BUS621、BUS622、BUS623、BUS624系列伺服器;
● BUM60、BUM61、BUM62、BUM63、BUM64系列伺服控制器;
● BUG622、BUG623、BUG3、BUG2、BUG20系列伺服电源;
● BUM616、BUM617、BUM618、BUM619系列伺服器;
● BUS6V、BUS3、BUS2系列伺服控制器;
● BKD6、BKF12、BKH63系列伺服器
● b maXX 1000系列● b maXX 4100系列● b maXX 2400系列● b maXX 4600系列● b maXX 2500系列● b maXX 5000系列● b maXX 3300系列● b maXX 5500系列● b maXX 4000系列
钦州鲍米勒伺服驱动器报警F067维修|柳州包米勒驱动器维修
鲍米勒伺服驱动器故障代码67: 主电源过压, M4100
1、自动复位/运行故障:当您对鲍米勒伺服器上的故障代码进行故障排除并看到自动复位故障代码时,您可以通过重新配置用户设置自动重新启动伺服器。如果您发现故障代码在指定的时间后不再存在,您可以尝试自行重启。
2、不可重置的故障:不可重置的故障代码可能需要更深入的分析或采取行动来修复您的机器。这种类型的鲍米勒故障代码可能是由编程或接线错误引起的。它可能需要电机或驱动器维修。必须先排除故障原因,然后才能复位并启动驱动器。
包米勒(BAUMUELLER)故障代码维修
F064、F065、F066、F067、F068、F069、F070、F071、F072、F073、F074、F075、F076、F077、F078、F079、F080、F081、F082、F083、F084、F085、F086、F087、F088、F089、F090、F091、F092、F093、F094、F095、F096、F097、F098、F099、F100、F102、F103、F112、F113、F114、F115、F116、F117、F118、F119、F120、F121、F122、F123、F124、F125、F126、F127、F128、F129、F130、F131、F132、F133、F134、F135、F136、F137、F138、F139、F140、F142、F143、F144、F145、F146、F147、F148、F149、F150、F151、F152、F153、F154、F155、F156、F157、F158、F159、F160、F161、F162、F163、F164、F165、F166、F167、F168、F169、F171、F172、F173、F174、F175
包米勒伺服驱动器常见故障维修方法。
1、LED灯是绿的,但是电机不动
(1)故障原因:一个或多个方向的电机禁止动作
包米勒伺服驱动器处理方法:检查+INHIBIT和–INHIBIT端口。
(2)故障原因:命令信号不是对驱动器信号地的。
包米勒伺服驱动器处理方法:将命令信号地和驱动器信号地相连。
2、上电后,驱动器的LED灯不亮
故障原因:供电电压太低,小于小电压值要求。
包米勒伺服驱动器处理方法:检查并提高供电电压。
3、当电机转动时,LED灯闪烁
(1)故障原因:HALL相位错误。
包米勒伺服驱动器处理方法:检查电机相位设定开关是否正确。
(2)故障原因:HALL传感器故障。
包米勒伺服驱动器处理方法:当电机转动时检测HallA,HallB,HallC的电压。电压值应该在5VDC和0之间。
4、LED灯始终保持红色
故障原因:存在故障。
包米勒伺服驱动器处理方法:原因:过压、欠压、短路、过热、驱动器禁止、HALL无效。
5、电机失速
(1)故障原因:速度反馈的极性搞错。
包米勒伺服驱动器处理方法:
a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以)
b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENCA和ENCB对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
(2)故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。确保该电源能提供足够的电流。如使用外部电源,确保该电压是对驱动器信号地的。
6、电机在一个方向上比另一个方向跑得快
(1)故障原因:无刷电机的相位搞错。
包米勒伺服驱动器处理方法:检测或查出正确的相位。
(2)故障原因:在不用于测试时,测试/偏差开关打在测试位置。
包米勒伺服驱动器处理方法:将测试/偏差开关打在偏差位置。
(3)故障原因:偏差电位器位置不正确。
包米勒伺服驱动器处理方法:重新设定。
7、示波器检查驱动器的电流监控输出端时,发现它全为噪声,无法读出
故障原因:电流监控输出端没有与交流电源相隔离(变压器)。
包米勒伺服驱动器处理方法:可以用直流电压表检测观察。
8、伺服电机高速旋转时出现电机偏差计数器溢出错误,如何处理?
(1)故障原因:高速旋转时发生电机偏差计数器溢出错误;
包米勒伺服驱动器处理方法:检查电机动力电缆和编码器电缆的配线是否正确,电缆是否有破损。
(2)故障原因:输入较长指令脉冲时发生电机偏差计数器溢出错误;
包米勒伺服驱动器处理方法:a.增益设置太大,重新手动调整增益或使用自动调整增益功能;
b.延长加减速时间;
c.负载过重,需要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负荷能力。
(3)故障原因:运行过程中发生电机偏差计数器溢出错误。
包米勒伺服驱动器处理方法:a.增大偏差计数器溢出水平设定值;
b.减慢旋转速度;
c.延长加减速时间;
d.负载过重,需要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负载能力。
9、伺服电机在有脉冲输出时不运转,如何处理?
①监视控制器的脉冲输出当前值以及脉冲输出灯是否闪烁,确认指令脉冲已经执行并已经正常输出脉冲;
②检查控制器到驱动器的控制电缆,动力电缆,编码器电缆是否配线错误,破损或者接触不良;
③检查带制动器的伺服电机其制动器是否已经打开;
④监视伺服驱动器的面板确认脉冲指令是否输入;
⑤Run运行指令正常;
⑥控制模式务必选择位置控制模式;
⑦伺服驱动器设置的输入脉冲类型和指令脉冲的设置是否一致;
⑧确保正转侧驱动禁止,反转侧驱动禁止信号以及偏差计数器复位信号没有被输入,脱开负载并且空载运行正常,检查机械系统。
包米勒伺服驱动器过流报警故障原因分析维修
1.负载短路
驱动器输出线短路或电机内部路。
解决方法:检测电机绝缘是否符合规格书要求,检查输出线接线。
2.输出UVW相序接错,导致驱动器输出失控
解决方法:检查电机接线线序。
惠州包米勒直流伺服驱动器维修:鲍米勒伺服驱动器也可以称为放大器,因为它能够从所有控制器获取控制信号并将其升级以提供一定量的电机电压和电流。伺服驱动器应用于机器人、自动化、数控加工等功能,甚至应用于半导体制造过程中。
包米勒变频驱动器维修维护:
接地故障:故障“F0016 EARTH FAULT”(显示在鲍米勒伺服驱动器的键盘上)表示存在接地故障。这仅表示驱动器已检测到电机电缆或电机中的接地故障。
推荐措施:检查电机和电机电缆的接地设置是否正确。确保电机电缆长度不超过鲍米勒驱动器声明的规格
检查正确的故障功能参数设置
确保在参数 3017 的可编程故障功能设置中输入正确的值
参数 3017“EARTH FAULT”选择在电机或电机电缆上检测到接地故障时鲍米勒伺服驱动器的反应方式。该保护功能仅在驱动启动期间有效。在输入电源线上检测到接地故障不会激活此功能。1 = 默认选择启用。
包米勒伺服驱动器F071故障维修方案梳理
BAUMUELLER伺服电机编码器调试修复
假如有下列結果,能够判断电源电路已出现异常:A、阻值三相不平衡,可以说明整流桥故障。B、红表棒接P端时,电阻无穷大,可以断定整流桥故障或起动电阻出现故障。其次是测试逆变电路:将红表棒接到P端,黑表棒分别接U、V、W上,应该有几十欧的阻值,且各相阻值基本相同,反相应该为无穷大。
将黑表棒接到N端,重复以上步骤应相同结果,否则可确定逆变模块故障。其次是动态测试:判断驱动器维修具体故障方法有哪几种2.动态测试的具体操作方法在静态测试结果正常以后,才可进行动态测试,即上电试机。在上电前后一定要注意以下几点:(1)上电之前,须确认输入电压是否有误,将380V电源接入220V级驱动器之中会出现炸(炸电容、压敏电阻、模块等)。
(2)检查驱动器各接播口是否已正确连接,连接是否有松动,连接异常有时可能导致驱动器出现故障,严重时会出现炸机等情况。(3)上电后检测故障显示内容,并初步断定故障及原因。(4)如未显示故障,首先检查参数是否有异常,并将参数复归后,进行空载(不接电机)情况下启动伺服驱动器,并测试U、V、W三相输出电压值。
如出现缺相、三相不平衡等情况,则模块或驱动板等有故障(5)在输出电压正常(无缺相、三相平衡)的情况下,带载测试。测试时,尽可能是满负载测试。然后对故障进行具体判断:(1)整流模块损坏:电压或内部短路引起。在排除内部短路情况下,更换整流桥。
在现场处理故障时,情况,电压,有污染的设备等。(2)逆变模块损坏:一般是由于电机或电缆损坏及驱动电路故障引起。在修理电路之后,测驱动波形良好状态下,更换模块。在现场服务中更换驱动板之后,还须注意检查马达及连接电缆。
大多数产生在启动加快段或低速档走刀时,通常是因为走刀传动齿轮的润化情况欠佳,伺服控制系统收获低及另加负荷过大等要素引发。是在要留意的是,伺服电机和滚珠丝杆连接用的连轴器,因为联接松脱或连轴器自身的缺点,如裂痕等,导致滚珠丝杆与伺服电机的不同歩,进而使走刀健身运动时快时慢。
BAUMUELLER伺服电机不转,常见确诊方式有:查验数控机床是不是有差分輸出;查验使能数据信是不是接入;根据液晶显示屏观察系统键入/出情况是不是考虑走刀轴的启动标准;对带电磁制动器的伺服电机确定制动系统早已开启;控制器有常见故障;伺服电机有常见故障;伺服电机电机和滚珠丝杆联接万向联轴器无效或键松掉等。
伺服驱动器又称为“伺服操控器”、“伺服放大器”,是用来操控伺服电机的一种操控器,其效果相似于伺服驱动器效果于一般沟通马达,属于伺服体系的一部分,首要应用于高精度的定位体系。一般是通过位置、速度和力矩三种办法对伺服电机进行操控,完成高精度的传动体系定位,现在是传动的高端产品。
必须按照说明书的规定,进行正确连线。错误的连线可能引起电动机失控或异常的震荡,也可能引起电动机机床的损坏。完成接线后,通电前要测量电源线与电动机壳体间的绝缘,测量应该用500V兆欧表或万用表进行,并用万用表检查信线和电动机壳体的绝缘,但决不能用兆欧表测量脉冲编码器线的绝缘。
刹车,一般指伺服电机后端的电磁机械抱闸装置,一般安装在电机后端,工作时通过作用在电机的主轴上的刹车片,对电机进行刹车并抱死电机主轴..伺服电机一般不会通过电磁机械抱闸装置进行制动,而电磁机械抱闸装置一般。
伺服电机通常意义上都有制动功能,是指依据伺服系统外部指令通过驱动器对电机进行快速制动。一般都用于斜轴或垂直轴,当停止供电时不使机械装置往下掉,刹车的扭矩比电机扭矩稍大于或等于电机扭矩。用途是设备上尽量多余的机械装置。 伺服电机电机不转,常见确诊方式有:查验数控机床是不是有差分信輸出;查验使能数据信是不是接入;根据液晶显示屏观察系统键入/出情况是不是考虑走刀轴的启动标准;对带电磁制动器的伺服电机电机确定制动系统早已开启;控制器有常见故障;伺服电机电机有常见故障;伺服电机电机和滚珠丝杆联接万向联轴器无效或键松掉等。
包米勒伺服电机的维修可以说是相对复杂的,但伺服电机因为长期连续不断使用或者使用者操作不当,会经常发生电机故障。BAUMUELLER伺服电机的维修需要专人来进行,小编现在就以伺服电机发生的几个常见的故障问题为大家简单介绍伺服电机维修,虽然不会十分透彻,但是您看后对伺服电机出现的问题一定不会再一头雾水了。
BAUMUELLER伺服电机的维修可以说是相对复杂的,但伺服电机因为长期连续不断使用或者使用者操作不当,会经常发生电机故障。包米勒伺服电机的维修需要专人来进行,小编现在就以伺服电机发生的几个常见的故障问题为大家简单介绍伺服电机维修,虽然不会十分透彻,但是您看后对伺服电机出现的问题一定不会再一头雾水了。
包米勒(BAUMUELLER)故障代码维修
F064、F065、F066、F067、F068、F069、F070、F071、F072、F073、F074、F075、F076、F077、F078、F079、F080、F081、F082、F083、F084、F085、F086、F087、F088、F089、F090、F091、F092、F093、F094、F095、F096、F097、F098、F099、F100、F102、F103、F112、F113、F114、F115、F116、F117、F118、F119、F120、F121、F122、F123、F124、F125、F126、F127、F128、F129、F130、F131、F132、F133、F134、F135、F136、F137、F138、F139、F140、F142、F143、F144、F145、F146、F147、F148、F149、F150、F151、F152、F153、F154、F155、F156、F157、F158、F159、F160、F161、F162、F163、F164、F165、F166、F167、F168、F169、F171、F172、F173、F174、F175、、、
包米勒伺服驱动器报错F069故障代码,这是一个在工业自动化领域常见的问题。针对这一故障,我们进行了深入的分析,并提出了相应的维修建议。
首先,F069故障代码通常表示伺服驱动器在运行过程中检测到了电机过热。这可能是由于电机长时间高负荷运行,或者电机散热系统存在问题导致的。为了解决这个问题,我们需要首先检查电机的运行状态,确认是否存在过载或堵转现象。同时,还需要检查电机的散热系统,包括散热风扇和散热片等,确保它们能够正常工作,有效地将电机产生的热量散发出去。
如果电机运行状态正常,散热系统也没有问题,那么故障可能出在伺服驱动器的控制算法上。此时,我们需要对伺服驱动器的控制参数进行调整,以降低电机的运行温度。这需要对伺服驱动器的控制原理有深入的了解,才能准确地进行参数调整。
在维修过程中,我们还需要注意一些安全事项。首先,维修前必须断开伺服驱动器的电源,以避免在维修过程中发生电击事故。其次,维修过程中要使用合适的工具和设备,避免对伺服驱动器造成二次损坏。后,维修完成后要进行全面的测试,确保伺服驱动器能够正常运行,且不再出现F069故障代码。
,针对包米勒伺服驱动器报错F069故障代码的问题,我们需要从电机运行状态、散热系统以及伺服驱动器控制参数等多个方面进行分析和维修。在维修过程中,要注意安全事项,并使用合适的工具和设备。维修完成后要进行全面测试,确保伺服驱动器能够恢复正常运行。
包米勒伺服电机F068,作为一款精密且高效的工业动力装置,其稳定性和可靠性对于生产线的顺畅运行至关重要。然而,即使是经过精心设计和制造的设备,也难免会遇到故障。当F068伺服电机出现故障时,及时的维修与恢复工作就显得尤为重要。
首先,我们需要对F068伺服电机进行全面的故障排查。这不仅仅是对电机外观的简单检查,更是对其内部结构的深入剖析。我们利用专业的检测工具,仔细分析电机的电流、电压、温度等参数,从而找出故障的根源。

一旦确定了故障点,维修工作就需要有条不紊地进行。对于电路板的损坏,我们采用先进的焊接技术,确保每个焊点都牢固可靠;对于机械部件的磨损,我们则选择优质的替换件,通过精密的装配工艺,使其与原设备完美匹配。
在维修过程中,我们严格遵循操作规范,确保每一步都准确无误。同时,我们还注重维修的时效性,力争在最短的时间内恢复电机的正常运行,减少生产线的停机时间。

此外,为了防止类似故障的再次发生,我们还会对F068伺服电机进行全面的维护和保养。我们定期清洁电机内部,检查各部件的磨损情况,并及时更换老化的部件。同时,我们还会对电机进行润滑,确保其运行更加顺畅。
总之,对于包米勒伺服电机F068的故障维修,我们始终以专业、高效、细致的态度,确保每一台电机都能在最短的时间内恢复正常运行。
本文详细解析了包米勒伺服驱动器故障F068的维修过程,包括故障含义了解、初步检查、详细排查、软硬件检查和全面测试等步骤。维修需综合运用测试仪器和工具,关注散热和软件设置,确保设备稳定运行。
在工业自动化领域,伺服驱动器作为关键的控制元件,其稳定性和可靠性对于整个生产线的运行至关重要。然而,任何设备在长时间运行中都难免会出现故障,包米勒伺服驱动器也不例外。本文将详细解析包米勒伺服驱动器故障F068的维修过程,旨在帮助相关从业人员更好地应对此类故障,提高设备维护水平。
首先,我们需要了解故障F068的具体含义。在包米勒伺服驱动器的故障代码中,F068通常表示某种特定的故障状态。为了准确诊断并修复故障,我们需要查阅包米勒伺服驱动器的相关维修手册或技术支持文档,以获取关于F068故障代码的详细信息。

在了解了故障F068的具体含义后,我们可以开始着手进行维修。首先,我们需要对伺服驱动器进行初步检查,包括检查外观是否有明显损坏、连接线路是否完好等。同时,我们还需要确认驱动器的供电情况是否正常,以及是否存在过载或短路等问题。
如果初步检查未发现明显异常,我们需要进一步对伺服驱动器进行详细的故障排查。这通常需要使用专业的测试仪器和工具,对驱动器的各项参数进行测试和测量。例如,我们可以使用示波器来检测驱动器的输出电压和电流波形,以判断是否存在异常波动或失真现象。此外,我们还可以使用万用表来检测驱动器的电阻、电容等元器件是否损坏。
在排查故障的过程中,我们需要根据测试结果逐步缩小故障范围。如果发现某个元器件损坏或性能异常,我们需要及时更换或修复。同时,我们还需要注意检查驱动器的散热情况,确保散热风扇正常运转,避免因过热而引发故障。
除了硬件方面的排查和修复外,我们还需要关注软件方面的问题。有时,伺服驱动器的故障可能是由于软件设置不当或程序错误导致的。因此,在维修过程中,我们需要对驱动器的软件设置进行检查和调整,确保各项参数和设置正确无误。
最后,完成故障排查和修复后,我们需要对伺服驱动器进行全面的测试,以验证其性能和稳定性是否恢复正常。这通常包括进行空载测试和负载测试,观察驱动器的运行状态和输出情况是否满足要求。如果测试结果正常,我们可以将伺服驱动器重新安装到生产线中,并继续观察其运行情况。
总结来说,包米勒伺服驱动器故障F068的维修过程需要我们对设备有深入的了解和丰富的经验。在维修过程中,我们需要综合运用各种测试仪器和工具,对驱动器进行全面的检查和测试,逐步缩小故障范围并最终找到问题所在。同时,我们还需要关注驱动器的散热情况和软件设置等方面的问题,确保设备能够稳定运行并满足生产需求。
BAUMULLER驱动器报F086故障维修情况说明
在工业生产和机械运行中,BAUMULLER驱动器扮演着至关重要的角色。然而,即使是再高效的设备,也难免会遇到故障或问题。而当BAUMULLER驱动器出现故障时,维修人员需要准确、快速地识别并修复故障,以确保生产线的正常运行。
当BAUMULLER驱动器报警F086时,这通常意味着“电机过热”或“驱动器过热”。在维修过程中,首先需要对驱动器的冷却系统进行检查,确保其正常运行。这包括检查冷却风扇是否正常工作,冷却管道是否堵塞,以及冷却液是否足够。如果发现冷却系统存在问题,需要及时进行修复或更换。
其次,需要检查驱动器的负载情况。负载过大或过小都可能导致过热故障。维修人员需要根据实际情况调整驱动器的负载,使其在合适的范围内运行。同时,还需要检查驱动器的运行模式,对于不合理的运行模式进行优化或调整。
此外,还需要对驱动器的硬件进行检查,包括电机、电源、电路等部件。这可以帮助维修人员确定是否存在其他潜在的故障或问题。如果发现硬件故障,需要及时进行更换或修复。
在进行BAUMULLER驱动器F086故障维修时,需要综合考虑多个因素,包括设备的工作环境、使用情况、历史故障等。同时,维修人员还需要具备丰富的经验和专业的技能,以便准确地识别并修复故障。
对于BAUMULLER驱动器的F086故障维修,需要迅速、准确地识别问题并进行修复。
BAUMUELLER伺服电机轴承故障修理 包米勒伺服驱动器空载或轻载运行正常,但带上一定负载后,出现电机振动、输出电压不稳定,频跳F085故障等。故障原因:驱动电路的供电电源电流输出能力
BAUMULLER驱动器出现P0209故障码时,需要进行全面的分析维修。P0209故障码通常指示“输出三相不平衡”或“输出缺相”,可能的原因包括驱动器内部电子元件故障、电机接线错误或接触不良等。
首先,需要对驱动器的各项参数进行全面的检查。这些参数包括驱动器的电源电压、电流、频率等,以及电机控制模式、编码器类型等。这些参数的检查有助于确定是否存在电源或控制信号的问题。y
其次,需要检查驱动器内部电子元件是否出现故障。这需要打开驱动器外壳,检查内部电路板和电子元件是否有明显的烧毁或损坏现象。如果有任何疑似故障的元件,需要用万用表等工具进行测量和检测,以确定其是否能够正常工作。
同时,还需要对电机接线进行检查。如果电机接线出现错误或接触不良,将会导致驱动器无法正常工作。需要逐一检查电机的电源线、编码器信号线等,确保它们连接良好且没有错接现象。
如果上述检查都没有问题,可以考虑是驱动器软件故障或是驱动器老化的问题。在这种情况下,需要对驱动器进行升级或是更换新的驱动器。
,BAUMULLER驱动器出现P0209故障码时,需要进行逐一分析和检查,找到故障的具体原因并进行维修或更换。同时,在日常使用中,也需要定期对驱动器进行检查和维护,以避免出现类似的故障。
包米勒伺服驱动器报警P0208代码检修方法如下:
当包米勒伺服驱动器出现报警P0208代码时,首先需要了解该代码的含义及其可能的原因。P0208报警通常表示驱动器内部电路出现故障,可能涉及电源、控制电路和功率元件等方面。在检修过程中,需要仔细检查这些方面,并采取相应的措施进行修复。
首先包,米检勒查伺电服源驱是动否器正需常要。稳定的电源才能正常工作。如果电源波动较大或存在电压不稳定的情况,可能导致驱动器内部电路故障,从而引发P0208报警。因此,在检修时需要使用稳定的电源,并确保电源电压在其规次定,范检围查内控。制电路是否正常。包米勒伺服驱动器的控制电路包括多个电子元件和线路,如果其中任何一个元件出现故障,都可能导致P0208因此报警。
需要逐一检查这些元件和线路,包括继电器、接触器、光电耦合器等,以确保它们都处于良好后状态检查功率元件是否正常。包米勒伺服驱动器的功率元件包括IGBT、二极管等,这些元件在驱动器中起着重要的作用。如果这些元件出现故障,可能导致驱动器无法正常工作,从而在引发报P0208时需要逐步检修。查这些元件,并采取相应的措施进行修复或更总换之。,当包米勒伺服驱动器出现报警P0208代码时,需要进行全面的检修,包括电源、控制电路和功率元件等方面。在检修过程中,需要仔细检查这些方面,并采取相应的措施进行修复。
包米勒驱动器是一种高精度的交流伺服驱动系统,常用于各种机械运动装置中。然而,当它报出F092故障时,就需要进行相应的故障判断与维修。
首先,F092故障码通常表示“再生制动故障”,这通常是由于驱动器在运行过程中,突然受到某种干扰或机械负载突变,导致驱动器未能及时响应而产生的。
针对此故障,可以采取以下判断和维修步骤:
1. 检查控制电源是否稳定。如果控制电源出现波动,可能会导致驱动器的工作受到影响,从而导致故障。
2. 检查驱动器的参数设置是否正确。有些参数如制动电阻的选择和设置不当,可能会影响驱动器的正常运行。
3.检查机械装置是否正常。机械装置的异常或错误,如传动轴的断裂或齿轮的磨损等,都可能导致驱动器无法正常运行,从而报出F092故障。
4. 重启驱动器和控制系统。有时候,重启设备可能就能解决一切问题。
如果以上方法都不能解决问题,就需要考虑更换驱动器或者控制系统了。记住,正确的使用和维护设备是防止故障发生的方法。
包米勒驱动器报警代码f0891
1、电机编码器信号接线不良或接 线错误; 检查连接器和信号线焊接情况。 2、电机编码器信号反馈电缆过长, 造成信号电压偏低; 缩短电缆长度(30m 以内)。 3、电机编码器损坏; 更换电机或其编码器。 4、伺服单元故障。 更换伺服单元。
包米勒伺服驱动器F089故障维修快捷指导解决
包米勒伺服驱动器F089故障影响系统稳定运行,需从电源、负载和散热等方面排查。可检查电源线路、负载情况、散热环境,尝试复位或查阅官方文档。必要时联系专业售后服务,确保生产线稳定运行。
包米勒伺服驱动器F089故障快捷指导解决,对于工业自动化领域的从业者来说,是一个常见而又棘手的问题。这一故障代码往往暗示着驱动器内部存在某种异常,可能影响到整个系统的稳定运行。因此,快速而准确地定位并解决F089故障,对于保障生产线的连续性和效率至关重要。
首先,我们需要了解F089故障的具体含义。在包米勒伺服驱动器的故障代码中,F089通常代表着一种特定的错误状态,可能是由于电源异常、过载运行、温度过高等多种因素造成的。因此,在解决这一故障时,我们需要从多个方面入手,进行全面的排查。
接下来,我们可以按照以下步骤进行故障排查和解决:首先,检查伺服驱动器的电源线路是否正常,是否存在松动或短路的情况;其次,查负载是否过重,是否超出了驱动器的承载能力;此外,还需要关注驱动器的散热情况,确保工作环境温度适宜,避免因过热而引发故障。
如果以上步骤未能解决问题,我们还可以尝试对驱动器进行复位操作,或者查阅包米勒的官方文档,了解更详细的故障信息和解决方案。在必要时,可以联系专业的售后服务人员,寻求专业的技术支持和帮助。
总之,解决包米勒伺服驱动器F089故障需要综合考虑多个因素,从多个角度入手进行排查和解决。通过科学的方法和专业的技术支持,我们可以快速而准确地解决这一问题,保障生产线的稳定运行。
鲍米勒伺服驱动器报警维修:87故障代码含义:安全继电器关闭(或故障)
鲍米勒驱动器维修:励磁控制中反馈控制方法:一是电压反馈控制;二是电流反馈控制。电压反馈是测量励磁端电压作为控制励磁端电压反馈量,它能恒压励磁端电压,但不能恒电流,不能恒定励磁磁场,对电机控制很理想。590中励磁控制方式选择了电压控制,励磁弱磁启动会被系统自动锁定,不会启动。电流反馈是测量励磁电流作为控制励磁电流反馈量,它能恒流励磁电流,此方式可以很好恒定励磁磁场。590中励磁控制方式选择了电流控制,励磁弱磁启动选择启动,电机就可以运转弱磁街段。
Baumueller伺服驱动器F0301编码器过速维修
aumueller伺服驱动器F0301的编码器过速故障可能由编码器损坏、电机故障或驱动器参数设置不当引起。维修时需检查编码器、电机,并调整驱动器参数。预防措施包括定期检查设备、合理使用设备和检查驱动器参数。摘要由作者通过智能技术生成
Baumueller伺服驱动器F0301是一款高性能的伺服驱动设备,广泛应用于各种工业自动化领域。然而,在使用过程中,有时会出现F0301编码器过速的故障,导致设备无法正常工作。本文将详细介绍F0301编码器过速故障的原因、维修步骤及预防措施,帮助读者更好地解决这一问题。
一、F0301编码器过速故障原因分析
F0301编码器过速故障通常是由以下几个原因引起的:
1. 编码器损坏:编码器是伺服驱动器中的重要组成部分,负责将电机的旋转角度转换为电信号,以供驱动器进行精确控制。若编码器损坏,会导致驱动器无法正确识别电机的转速,从而引发过速故障。
2. 电机故障:电机本身的问题也可能导致编码器过速故障。例如,电机轴承磨损、电机绕组短路等,都可能导致电机转速异常,进而引发编码器过速故障。
3. 驱动器参数设置不当:驱动器参数的设置对于设备的正常运行至关重要。若参数设置不当,如加速度、减速度设置过大,可能导致电机在启动或停止过程中产生过大的冲击力,从而引发编码器过速故障。
二、F0301编码器过速故障维修步骤
针对F0301编码器过速故障,可以采取以下维修步骤:
1. 检查编码器:首先,需要检查编码器是否损坏。可以通过观察编码器的外观、测量编码器的输出信号等方式进行判断。若编码器损坏,需要及时更换。
2. 检查电机:在确认编码器无损的情况下,需要检查电机是否存在故障。可以通过检查电机轴承、绕组等部分,判断电机是否正常运行。若电机故障,需要及时更换或维修。
3. 调整驱动器参数:若编码器和电机均正常,可能是驱动器参数设置不当导致的故障。此时,需要根据设备的实际情况,调整驱动器的加速度、减速度等参数,以确保设备在启动和停止过程中能够平稳运行。
三、预防措施
为了避免F0301编码器过速故障的发生,可以采取以下预防措施:
1. 定期检查设备:定期对设备进行检查,包括编码器、电机等部分,确保设备处于良好的运行状态。
2. 合理使用设备:在使用设备时,应遵循设备的操作规程,避免过度使用或不当操作导致设备损坏。
3. 定期检查驱动器参数:定期对驱动器参数进行检查和调整,确保参数的合理性,避免参数设置不当导致的故障。
总之,F0301编码器过速故障是一种常见的伺服驱动器故障,其原因可能涉及编码器、电机和驱动器参数等多个方面。在维修过程中,需要仔细检查各个部分,找出故障原因并采取相应的维修措施。同时,通过采取预防措施,可以有效降低故障的发生概率,确保设备的稳定运行。
BAUMULLER包米勒伺服驱动器报警代码讲解?
| 4144=设置周期的值无效 |
|
4145=实际值期间的值无效 |
|
4146=循环偏移设定点的假值 |
|
4147=循环偏移实际值的假值 |
|
4148=循环数据BACI超时 |
|
4149=服务数据的BACI超时 |
|
4150=检查错误校验的结果 |
|
4151=在等待从属类型或等待配置笔标记的设置时加速超时 |
|
4152=无效的数据传输结构类型 |
|
4153=内部错误:错误的BACI状态 |
|
4154=循环通信中与从站的访问冲突: |
|
4155=错误循环通信:参数值错误 |
|
4156=错误循环通信:活动计数器冲突 |
|
4157=Cmd接口:通道号错误(0或> 6) |
|
4158=Cmd接口:指示的通道不存在 |
|
4159=Cmd接口:内部错误 |
|
4160=Cmd接口:内部错误 - 状态错误 |
|
4161=Cmd接口:错误的包装数量 |
|
4162=Cmd接口:错误的命令编号 |
|
4163=Cmd接口:处理包时的状态错误 |
|
4164=Cmd接口:命令处理超时 |
|
4165=Cmd界面:错误的包装长度 |
|
4166=Cmd界面:描述符不可用 |
|
4167=Cmd界面:错误的包装类型 |
|
4168=Cmd界面:校验故障 |
|
4169=模块识别:读取时出现PCI错误 |
|
4170=块识别:写入时出现PCI错误 |
|
4171=模块识别:一般读取错误 |
|
4172=模块识别:写入时的一般错误 |
|
4173=内部错误 |
|
4174=配置循环服务:参数不是循环可写的 |
|
4175=配置循环服务:无效参数编号 |
|
4176=错误的选项,模块错误代码 |
|
4177-8191=保留 |
|
8192=错误CANopen超时(在编程手册中查找) |
维修Baumuller鲍米勒伺服驱动器,变频器,控制器,电源,直流调速器,plc等,全系列BE2,BKF,BUC,BUM,BGS,BKH,BUG,BUS,BKD,BMC,BUH,Other,BKE,BUB,BUL,EK2等维修。
鲍米勒伺服驱动过流维修与排查方法:
1.故障原因①:负载短路
驱动器输出线短路或电机内部路。
解决对策:检测电机绝缘是否符合规格书要求,检查输出线接线。
2.故障原因②:输出UVW相序接错,导致驱动器输出失控
解决对策:检查电机接线线序。
3.故障原因③:编码器型号错误或者接线不良,导致驱动器输出失控
解决对策:检查编码型号、接线与驱动器设置参数是否一致。
4.故障原因④:加速时间设置太短
驱动器启动加速时间设定太短,提升设定太大,导致加速电流过大。
解决对策:适当降低加速时间。
5.故障原因⑤:机械部位有卡住
抱闸未打开,电机轴承损坏,执行机构损坏等。
解决对策:检查机械部件是否正常。
6.故障原因⑥:电动机及驱动器的转矩能力过小
包米乐(鲍米勒)驱动器maXX 2400系列报警代码:E-03,E-04
报警意义:E-03电压过高(交流电压超过285V,整流后直流403V)。
E-04电压过低(交流电压低于185V,整流后直流263V)。
产生原因:电压输入过高,过低或、母线校准不正确。
解决方法:查看DP-06,显示值是否在263-403范围内,否则一般维修驱动板上的母线采样电阻1M欧姆。
专业维修,回收,出售鲍米勒伺服驱动器,BAUMULIER放大器,苞米乐控制器,苞米乐电机,包米乐伺服马达,BAUMULIER直流电机,包米乐高扭矩电机,苞米乐盘式电机
鲍米勒伺服驱动器常见故障维修:上电报警、上错电、炸机、上电无显示、有显示无输出、过电流、过电压、欠电压、过热、过载、过速、缺相、抖动、编码器异常、模块损坏、接地故障、参数错误等。
1:伺服驱动器空载正常,重载异常 2:伺服驱动器满载高速是否异常。
3:伺服驱动器满载低速是否正常。 4:伺服驱动器起动加速是否正常。
5:伺服驱动器起动减速是否正常。 6:伺服驱动器输出电压是否平衡。
7:伺服驱动器输出电流是否平衡。 8:伺服驱动器负载轻重变化时,最大电流是否正常。
1106Drive operation mode not allowed with this motor operation mode Drive operation mode not allowed with this motor mode operation mode. error caused when changing
1035:No valid Lt data available in the One Wire Eeprom One Wire Eeprom中没有可用的有效Lt数据 Warning: No valid Lt data available in the One Wire EEPROM.
动力装置参数的参数化发生在数据记录或有故障。1066:SS1 stop forced by SAF module SAF模块强制SS1停止 If SS1 function is activated on SAF-002/-003 module and an appropriat
报警代码18/19号
故障:时隙-时间错误
Baumuller包弥勒/包弥勒驱动器常见故障维修
过流故障:
驱动器的过流故障是最常见也是较复杂的故障,当过流故障发生时,驱动器保护电路会立即动作并停机,同时驱动器显示故障代码或故障类型。
大多数情况下可以根据驱动器显示的故障代码迅速找到故障原因并排除故障,但也有一些过流故障的原因是多方面的,并不是单一的,而是包含了加速、减速、恒速过流、负载发生突变、输出短路等各种可能导致过流护的因素。
下面分析驱动器过流故障原因以及过流故障处理方法。
驱动器过流内部电路分析,对于典型的IGBT驱动保护电路,14脚监视IGBT饱和压降,当脚14检测到IGBT集电极上电压≥7V时,而不管输入驱动信号是否继续,11脚输出都将被强行关断。
同时第6脚输出过流故障信号给CPU。图五是另一种过流检测电路,用的是比较运放电路,当通过传感器检测到的电流信号与一标准信号作比较,而判断是否过流。
Baumuller BM4400鲍米勒驱动器维修报16/17故障专业维修

鲍米勒伺服驱动器报16故障是启动错误,报17故障是软件错误,那么对于此类故障应该怎么检测与维修呢?
报警代码16
故障:启动错误
报警代码17
故障:软件错误
一、超程
当进给运动超过由软件设定的软限位或由限位开关决定的硬限位时,就会发生超程报警。一般会在CRT上显示报警内容。根据数控系统说明书,即可排除故障,解除报警。
二、过载
当进给运动的负载过大,频繁正反向运动以及传动链润滑状态不良时,均会引起过载报警。一般会在CRT上显示伺服电机过载、过热或过流等报警信息。同时,在强电柜中的进给驱动单元上,指示灯或数码管会提示驱动单元过载、过电流等信息。
三、窜动
在进给时出现窜动现象,其原因包括:① 测速信号不稳定,如测速装置故障、测速反馈信号干扰等;② 速度控制信号不稳定或受到干扰;③接线端子接触不良,如螺钉松动等。当窜动发生在由正向运动与反向运动的换向瞬间时,一般是由于进给传动链的反向间隙或伺服系统增益过大所致。
Baumuller鲍米勒伺服器维修,Baumuller鲍米勒伺服驱动器维修,Baumuller鲍米勒伺服放大器维修:bum20b、bum60vca、bum60vca、bum20b、bum25、bum、bum、bum、bum、bum、bumb、bumb、bume、bumb、bum60bb、bumr、bumr、bus、bus、bus、bus、bus、bus、bus、bus、bus21l、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus、bus等维修
包米勒伺服驱动器系列维修。BUM60-30/60系列驱动器维修,BUM60-12/24系列驱动器维修,BUM60-60/120系列驱动器维修。BM4462-FI1系列驱动器维修,BUM618-12/18系列驱动器维修,BUM60S-04/08系列驱动器维修,BUM60S-08/12系列驱动器维修,BUM60S-12/24系列驱动器维修,BUS6-VC系列驱动器维修。
1.故障原因①:制动电阻未连接或阻值过大
电机处于制动工况时,负载侧向驱动器母线回馈能量,如果驱动器不能及时将这些能量通过制动电阻消耗,母线电压会不断,直到报出OU过压故障。
解决对策:检查制动电阻连接是否可靠,并确认制动电阻阻值是否符合产品说明书要求。
2.故障原因②:制动或减速时间过短
驱动器制动或者减速时间过小时,制动、减速工况时功率较大,超出制动单元所能承受值,导致母线电压超出设定值。
解决对策:在满足控制要求的条件下,调整驱动器的控制参数,例如适当增加(或延长)制动时间或减速时间。
3.故障原因:③电源输入电压过大
主要为电源侧冲击过电压,补偿电容在合闸或断开时形成的过电压等,主要特点电压变化率和幅值都很大。
解决对策:在电源输入侧增加吸收装置(并联浪涌吸收装置或串联电抗器等)。
4144=设置周期的值无效
4145=实际值期间的值无效
4146=循环偏移设定点的假值
4147=循环偏移实际值的假值
4148=循环数据BACI超时
4149=服务数据的BACI超时
4150=检查错误校验的结果
4151=在等待从属类型或等待配置笔标记的设置时加速超时
4152=无效的数据传输结构类型
4153=内部错误:错误的BACI状态
4154=循环通信中与从站的访问冲突:
4155=错误循环通信:参数值错误
4156=错误循环通信:活动计数器冲突
4157=Cmd接口:通道号错误(0或> 6)
4158=Cmd接口:指示的通道不存在
4159=Cmd接口:内部错误
4160=Cmd接口:内部错误 - 状态错误
4161=Cmd接口:错误的包装数量
4162=Cmd接口:错误的命令编号
4163=Cmd接口:处理包时的状态错误
4164=Cmd接口:命令处理超时
4165=Cmd界面:错误的包装长度
4166=Cmd界面:描述符不可用
4167=Cmd界面:错误的包装类型
4168=Cmd界面:校验故障
4169=模块识别:读取时出现PCI错误
4170=块识别:写入时出现PCI错误
4171=模块识别:一般读取错误
4172=模块识别:写入时的一般错误
4173=内部错误
4174=配置循环服务:参数不是循环可写的
4175=配置循环服务:无效参数编号
4176=错误的选项,模块错误代码
4177-8191=保留
8192=错误CANopen超时(在编程手册中查找)
深圳鲍米勒伺服驱动器维修:当鲍米勒伺服驱动器出现故障时,生产通常会停止。您如何快速找到并解决问题?也会面临着将其恢复运行的压力。不要让这种压力使您花费更长的时间来解决问题。相反,请记住 鲍米勒伺服驱动器故障排除检查点:检查基础知识(控制器显示、连接和温度)。
良明冲版机鲍米勒伺服驱动器维修:故障解析:
C109故障含义:MDT(S-0-0009)中的数据记录位置为偶数
P0204
功能或选件模块出错:
48 =功能模块A中的错误
49 =功能模块B出错
50 =功能模块C中的错误
51 =功能模块D中的错误
52 =功能模块E中的错误
53 =选件模块G出错
54 =选件模块H出错
55 =选件模块J中的错误
56 =选件模块K出错
57 =选件模块L出错
58 =选项模块M中的错误
59 =等待从站的RST信号时超时
60 = SPI传输模块f控制器中的CRC错误
61 = SPI传输控制器模块中的CRC错误
62-63 =保留
苞米乐驱动器maXX 4400系列E002报警代码维修
E002报警代码通常表示焊接机驱动器输入电压低于正常范围。可能的原因包括供电电压不稳定、电网电压波动等。为了解决该问题,可以加装压变来提高电压稳定性,或安装UPS备用电源。
Baumueller伺服驱动器F0301的编码器过速故障可能由编码器损坏、电机故障或驱动器参数设置不当引起。维修时需检查编码器、电机,并调整驱动器参数。预防措施包括定期检查设备、合理使用设备和检查驱动器参数。
Baumueller伺服驱动器F0301是一款高性能的伺服驱动设备,广泛应用于各种工业自动化领域。然而,在使用过程中,有时会出现F0301编码器过速的故障,导致设备无法正常工作。本文将详细介绍F0301编码器过速故障的原因、维修步骤及预防措施,帮助读者更好地解决这一问题。
一、F0301编码器过速故障原因分析
F0301编码器过速故障通常是由以下几个原因引起的:
1. 编码器损坏:编码器是伺服驱动器中的重要组成部分,负责将电机的旋转角度转换为电信号,以供驱动器进行精确控制。若编码器损坏,会导致驱动器无法正确识别电机的转速,从而引发过速故障。
2. 电机故障:电机本身的问题也可能导致编码器过速故障。例如,电机轴承磨损、电机绕组短路等,都可能导致电机转速异常,进而引发编码器过速故障。
3. 驱动器参数设置不当:驱动器参数的设置对于设备的正常运行至关重要。若参数设置不当,如加速度、减速度设置过大,可能导致电机在启动或停止过程中产生过大的冲击力,从而引发编码器过速故障。
二、F0301编码器过速故障维修步骤
针对F0301编码器过速故障,可以采取以下维修步骤:
1. 检查编码器:首先,需要检查编码器是否损坏。可以通过观察编码器的外观、测量编码器的输出信号等方式进行判断。若编码器损坏,需要及时更换。
2. 检查电机:在确认编码器无损的情况下,需要检查电机是否存在故障。可以通过检查电机轴承、绕组等部分,判断电机是否正常运行。若电机故障,需要及时更换或维修。
3. 调整驱动器参数:若编码器和电机均正常,可能是驱动器参数设置不当导致的故障。此时,需要根据设备的实际情况,调整驱动器的加速度、减速度等参数,以确保设备在启动和停止过程中能够平稳运行。
三、预防措施
为了避免F0301编码器过速故障的发生,可以采取以下预防措施:
1. 定期检查设备:定期对设备进行检查,包括编码器、电机等部分,确保设备处于良好的运行状态。
2. 合理使用设备:在使用设备时,应遵循设备的操作规程,避免过度使用或不当操作导致设备损坏。
3. 定期检查驱动器参数:定期对驱动器参数进行检查和调整,确保参数的合理性,避免参数设置不当导致的故障。
总之,F0301编码器过速故障是一种常见的伺服驱动器故障,其原因可能涉及编码器、电机和驱动器参数等多个方面。在维修过程中,需要仔细检查各个部分,找出故障原因并采取相应的维修措施。同时,通过采取预防措施,可以有效降低故障的发生概率,确保设备的稳定运行。
鲍米勒伺服驱动器bm4453:鲍米勒伺服驱动器是用来控制伺服马达的一种调速来实现马达的转数及定位,一般是采用关闭环控制,其效果类似于交流变频器于一般交流马达,大致鲍米勒(BAUMULLER)伺服驱动器体系的一部分,首要应用于高精度的定位体系。一般是通过方位、速度和力矩三种方法对伺服电机进行操控,完成高精度的传动体系定位,目前是传动技术的高端产品。当然高端产品维修起来也是十分麻烦。
鲍米勒伺服驱动器bm4453:F0301故障代码含义:更换伺服电机DSG71,发现故障依旧。编码器过速。
维修方法: 检查发现是V-Controller主控板上电路故障,更换受损的IC后故障即消失,正常测试8小时后交付客户。
baumuller伺服驱动器故障代码
Baumuller伺服驱动器的故障代码涵盖了多个方面,包括编码器故障、通信错误、驱动管理程序故障、数据记录管理故障以及位置控制器故障等。具体到用户提到的故障代码:12
- F089报警可能指示了通信或数据记录管理方面的故障。
- F1016和F1752则是位置控制器故障,可能涉及到位置动态偏差、位置静态偏差、编码器非活动状态或其他位置相关的错误。
此外,Baumuller伺服驱动器的故障代码还包括但不限于:
- 增量编码器仿真模块相关的错误(如152-159)。
- 驱动管理程序故障,如超时通信(160-167)。
- 数据记录管理故障,如EEPROM复制错误(176-188)。
- 位置控制器故障,如位置动态偏差(192-204)。
对于具体的故障代码,建议参考Baumuller的技术文档或联系专业维修人员进行进一步的检修。
鲍米勒伺服驱动器维修公司:故障解析:
驱动器可能检测到大量可能的“主要故障”情况,每种情况都由键盘上显示的“CPFxx”标识,其中“xx”是两位数。您会在下面详细了解几个常见的 CPF 错误,以及推荐的解决方案。注意:这些故障需要维修或更换驱动器。
CPF02(A/D 转换错误) ——该故障表明发生了 A/D 转换错误。对驱动器重新通电。如果问题仍然存在,请修理/更换驱动器。
CPF03(PWM 数据错误) ——此故障表示包米勒驱动器硬件损坏,从而损坏 PWM 数据。修理/更换驱动器。
CPF06(EEPROM 数据错误) ——该故障表明控制电路损坏。修理驱动器。
CPF11(RAM 故障) ——故障表示 RAM 硬件损坏。修理驱动器。
CPF12(闪存故障) ——此故障表明驱动器的 ROM 已损坏或损坏。修理驱动器。
CPF13(看门狗电路异常,自诊断问题) ——这意味着内部硬件损坏。修理驱动器。
CPF14(控制电路故障,CPU 错误) ——另一个表示控制电路损坏的故障代码,特别是与 CPU 相关的。修理驱动器。
包米勒直流伺服驱动器维修:鲍米勒伺服驱动器也可以称为放大器,因为它能够从所有控制器获取控制信号并将其升级以提供一定量的电机电压和电流。伺服驱动器应用于机器人、自动化、数控加工等功能,甚至应用于半导体制造过程中。
包米勒变频驱动器维修维护:
接地故障:故障“F0016 EARTH FAULT”(显示在鲍米勒伺服驱动器的键盘上)表示存在接地故障。这仅表示驱动器已检测到电机电缆或电机中的接地故障。
推荐措施:检查电机和电机电缆的接地设置是否正确。确保电机电缆长度不超过鲍米勒驱动器声明的规格
检查正确的故障功能参数设置
确保在参数 3017 的可编程故障功能设置中输入正确的值
参数 3017“EARTH FAULT”选择在电机或电机电缆上检测到接地故障时鲍米勒伺服驱动器的反应方式。该保护功能仅在驱动启动期间有效。在输入电源线上检测到接地故障不会激活此功能。1 = 默认选择启用。
包米勒伺服驱动器报警维修显示代码1,2,16修理(0=预订的1=看门狗错误2=发生了不正确或意外的中断)快速解决故障,包米勒伺服驱动器由于长时间的使用,难免会出现故障,最重要的是及时查找出原因,对应解决故障,及早恢复正常使用,有测试平台,免费检测,不修不收费用,修不好不收费用,以下是我司工程师整合的包米勒伺服驱动器的误编码及其含义资料供大家参考,如有任何问题可随时联系。
包米勒伺服驱动器报警维修显示代码1,2,16修理,包米勒伺服驱动器常见故障错误编码及含义
错误编码 含义
0 预订的
1 看门狗错误
2 发生了不正确或意外的中断
3 NMI 中断/总线错误
4 到 15 保留,未分配 = 0
16 启动错误
17 软件错误
18 时隙配置
19 时隙 - 时间错误
20 1 = 没有可用内存
21 错误代码无效
22 警告代码无效
23 FPGA 版本不正确
24 两态控制器:写入目标参数时出错
25 校验和错误闪存系统数据
26 不支持电源单元
27 至 31 保留,未分配 = 0
32 超时协议
33 协议结构
34 错误的模块类型
35 电报中的数据过多
36 电报数据不足
37 无效的操作数
38 无效的内存类型
39 无效的操作数地址
40 值小于最小值
41 值大于最大值
42 参数写保护
43 此操作状态下的参数不可写
44 无效的参数值
45 通信错误
的Prodrive 控制器
46 至 47 保留,未分配 = 0
48 功能模块 A 错误
49 功能模块 B 错误
50 功能模块 C 中的错误
51 功能模块 D 错误
52 功能模块 E 错误
53 选件模块 G 中的错误
54 选件模块 H 中的错误
55 选项模块 J 中的错误
56 选件模块 K 中的错误
57 选件模块 L 中的错误
58 选件模块 M 中的错误
59 超时当等待的RST信号
的奴隶
60 SPI 传输模块 f 控制器中的CRC 错误
61 SPI 传输控制器 f 模块中的CRC 错误
62 至 63 保留,未分配 = 0
64 电源故障
65 缺相
66 欠压电源,
仅限 BM4100
67 过压电源,
仅限 M4100
68 欠压 24 V
69 至 78 保留,未分配 = 0
79 电源监视器 - 组错误
80 根据Hiperface ®规范的通信错误
81 散热器温度
82 过电压Uzk
83 过流
84 接地电流
85 设备内部温度过高
86 电缆断裂内部温度传感器或
内部温度 < 5 °C
87 安全继电器关闭(或故障)
88 电桥短路
89 动力装置未准备好运行
90 直到 FW 03.08断相
从 FW 03.09 保留
91 电源故障
来自 FW 03.09 保留
92 电源欠压
93 电源过压
94 欠压 UDC 链路
95 保留,未分配 = 0
96 短路温度传感器
(TM -30 °C)
97 温度传感器 - 电机未连接
(TM > +300 °C)
98 电机过热
99 误差 I2t > 100 %
100 功率单元最大电流>电机最大
电流
101 保留,未分配 = 0
102 组错误查找槽口位置
103 至 111 保留,不分配
112 通讯错误编码器 1
113 预订的
114 覆盖编码器位置信息时出错
115 断线编码器 1
116 超速编码器 1
117 超出幅度限制
118 编码器类型未知
119 电机数据的无效数据字段
120 电机数据不正确
121 电机数据保存错误
122 电机数据写保护
123 视场角误差
124 不带温度测量的编码器
125 电子铭牌编码器内存容量
太小
126 至 127 保留,未分配 = 0
128 通讯错误编码器 2
129 预订的
130 覆盖编码器位置信息时出错
131 断线编码器 2
132 超速编码器 2
133 超出幅度限制
134 编码器类型未知
135 电机数据的无效数据字段
136 电机数据不正确
137 电机数据保存错误
138 电机数据写保护
139 视场角误差
140 不带温度测量的编码器
141 电子铭牌编码器内存容量
太小
142 至 143 保留,未分配 = 0
144 编码器 1 的绝对位置未知
145 编码器 2 的绝对位置未知
146 编码器模块 1 不可用
147 编码器模块 2 不可用
148 用于存储测量值的编码器模块
不可用
149 当使用旋转变压器没有测量值STOR
年龄可能
150 无法触发,无增量编码器
151 数字 I/O 模块不可用
152 增量编码器仿真是必需的,但
不可用
153 增量编码器仿真需要编码器模块 1,
但不可用
154 增量编码器仿真需要编码器模块 2,
但不可用
155 增量编码器仿真模块初始化错误
156 增量编码器仿真模块
硬件信号错误
157 误差增量编码器仿真模块
158 SSI 编码器仿真模块不可用
159 设定值源编码器 1 或编码器2出错
160 超时通讯
161 超时 BACI
162 超时循环通讯
163 超时服务数据
164 现场总线错误
165 控制器与外部信号不同步
166 制动控制错误
167 启动驱动器时没有松开抱闸
168 停止驱动时不关闭抱闸
169 抱闸状态错误(循环监控)
170 错误保持制动衬片
171 初始化抱闸错误
172 抱闸错误:未达到抱闸扭矩
173 至 175 保留,未分配 = 0
176 EEPROM 复制错误
177 写超时 EEPROM
178 校验和错误 EEPROM
179 没有启动数据集
180 不兼容的软件
181 没有数据集
182 校验和错误IM PSI模块
183 PSI 已重置
184 PSI 数据无效
185 自动调整表无效。
186 A/D 校正表无效
187 EEPROM 复位
188 至 191 保留,未分配 = 0
192 位置偏差动态
193 位置偏差静态
194 编码器1用于位置控制,但是
不活动的。
195 编码器2用于位置控制,但是
不活动的。
196 超出软件限位开关 1
197 超出软件限位开关 2
198 超出硬件限位开关 1
199 超出硬件限位开关 2
200 需要归位但尚未执行
201 模式设定点集,设定点
集不及时
202 目标位置 v 模数位置
203 主轴定位:
触发器初始化时出错
204 主轴定位:
触发信号超时
205 执行归位时出错
206 至 207 未分配 = 0
208 驱动器被阻止
209 编码器1被参数化为编码器,用于将
电机控制,但评价是不ACTI
vated 。如果错误设置位于非活动数据记录之一中,也会显示此错误
。
210 编码器2参数化为编码器,用于将
电机控制,但评价是不ACTI
vated 。如果错误设置位于非活动数据记录之一中,也会显示此错误
。
211 超速开环
213 出口限制:
超过最大电气频率
214 至 223 未分配 = 0
224 至 234 未分配 = 0
235 扭矩耦合:主站中的一般错误
236 扭矩耦合:从站中的操作模式
不是速度控制
237 配置错误反应返回动作
无效
238 未到达返回运动目标位置
239 应用程序错误
(由 P0302 位 1 启用)

